
Solving the AXB=YCZ Problem for a Dual-Robot System with Geometric Calculus
Published in IEEE Transactions on Automation Science and Engineering, 2023
Recommended citation: Sui S, Ding Y. Solving the AXB= YCZ Problem for a Dual-Robot System With Geometric Calculus[J]. IEEE Transactions on Automation Science and Engineering, 2023. https://ieeexplore.ieee.org/document/10215071
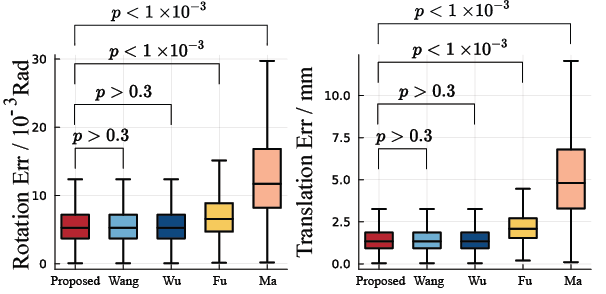
Calibrate a dual-robot system by modeling and solving the problem with Geometric Algebra and Geometric Calculus. The proposed method is ~4x faster than the state-of-the-art algorithm while maintain the same level of accuracy.

High accuracy
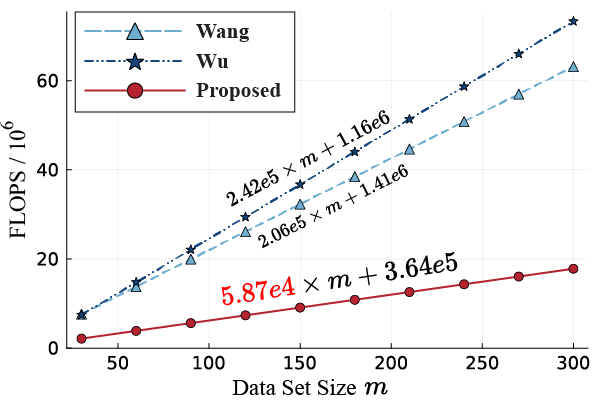
High Efficiency
| Execution Time | Flops | | ———– | ———– | | 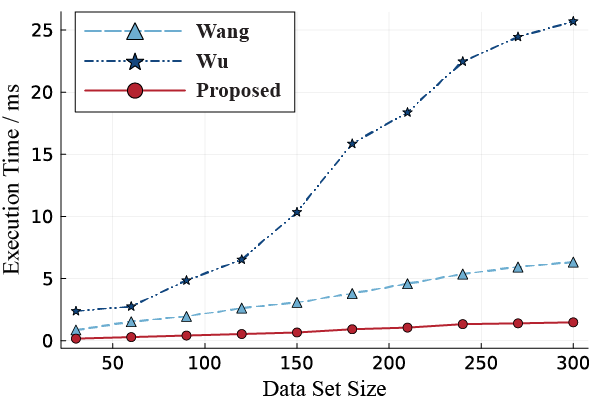 |
|  |
|
The proposed method solves the problem ~4.5x faster with ~3.5x less computational load than SOTA.